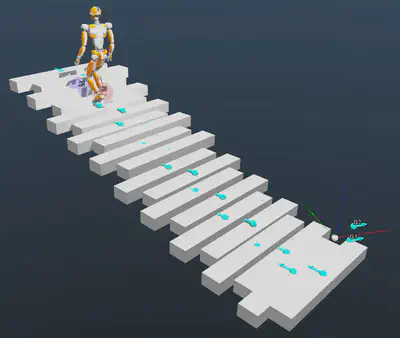
In this project, we aim to create humanoid robot movements in a 3D space that includes both flat areas and stairs of varying heights. To do this effectively, we need to carefully plan both the steps the robot will take and its overall body move- ment. We’ve decided to handle these two aspects—footstep sequencing and full-body motion—separately. This separation allows for more precise control over the movement’s quality. The effectiveness of the footstep plan can be measured using various criteria, like the number of steps or other performance metrics. The quality of the movement, on the other hand, is primarily judged by its ability to meet all necessary constraints to prevent falls and maintain stability. Separating the planning and control processes also simplifies fine-tuning, as it narrows down the range of influence for each parameter. We propose a hierarchical control scheme with dynamic and static step planners and a Reinforcement Learning (RL) based controller. In this report we will present the planning and control methods used in our system, a comparison of the different path planning algorithms we used, our bipedal robot JVRC-1 achieving respectable performance traversing both flat surfaces and stairs in MuJoCo simulation, as well as unsuccessful attempts and future work.
Zhuolun (Alan) Zhao
Robotics Master Student @ Penn | Robotics & AI Engineer
Building robots for the next generations.